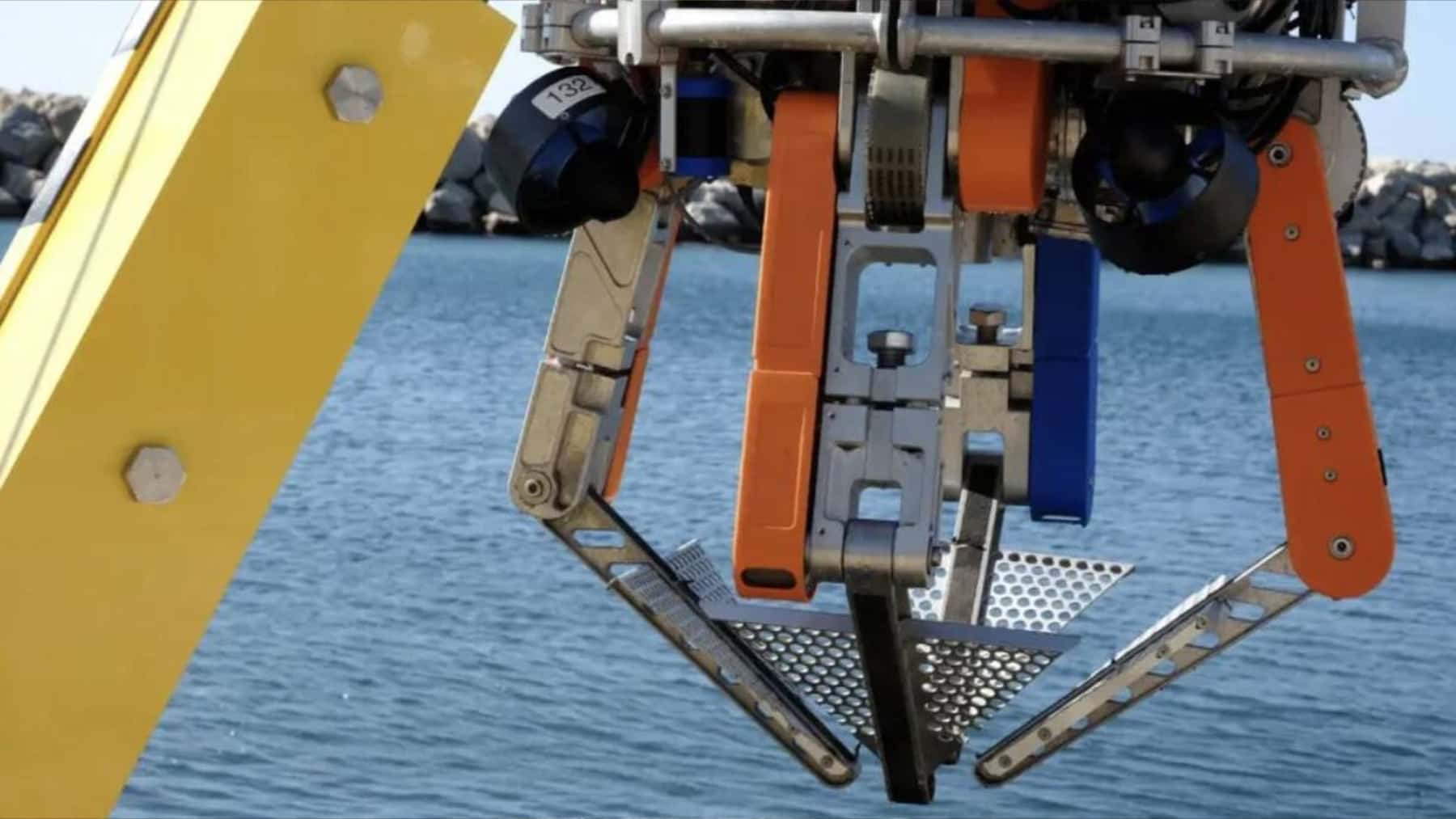
Pesa 120 kilos y carga 250. Esa es la primera paradoja de SeaClear, el robot submarino con forma de araña que la Universidad Técnica de Múnich ha desarrollado para limpiar fondos marinos donde no llegan los buzos ni las redes de arrastre. Ocho miniturbinas le dan estabilidad en el fondo.
Una pinza de cuatro dedos con sensores de presión le permite apretar hasta 4.000 newtons para arrancar una rueda de camión enterrada en el sedimento, y soltar con delicadeza suficiente para no romper una botella de vidrio. En la demostración del puerto de Marsella, el 16 de septiembre de 2025, operó sin incidencias a 16 metros de profundidad en agua turbia.
El sistema no trabaja con un solo robot. Drones aéreos sobrevuelan la costa e identifican zonas con concentración de residuos; el robot submarino desciende a recuperarlos. Debajo del agua, el robot usa cámara y sonar para operar incluso cuando la visibilidad es nula.
La inteligencia artificial que controla la clasificación fue entrenada con más de 700 imágenes de objetos submarinos. Con ese entrenamiento, el sistema distingue plásticos, metales, neumáticos, redes de pesca abandonadas y bloques de hormigón de los peces y otras criaturas que comparten el mismo espacio. Cuando identifica un residuo, ajusta automáticamente la fuerza de la pinza según el peso y la fragilidad del objeto antes de moverlo.
Porque el problema real está en el fondo y no en la superficie
La gran mayoría de los residuos que entran en el océano no flotan: se hunden. Las limpiezas de playa y las campañas de recogida en superficie retiran lo que es visible, pero el volumen más grande queda enterrado en el lecho marino, donde el acceso con equipo de buceo es limitado, costoso y en muchas zonas imposible por la profundidad o las corrientes.
SeaClear 2.0, la segunda fase del proyecto financiado por la Comisión Europea a través del programa Horizonte, tiene previstas tres demostraciones a escala completa y tres pruebas piloto en diferentes puntos del Mediterráneo. En cada misión, el robot puede cargar hasta 250 kilos de residuos por viaje, con la energía y los datos suministrados por un cable desde una embarcación de apoyo en superficie.